|
|
With over ten years experience designing products, engineering consulting, launching products, manufacturing products, and solving new problems, I am uniquely positioned to help you complete your project.
I take a limited number of projects, and devote my full attention to each one. From napkin concept to a finished prototype or production ready design, I've been through it a few times. Please Contact me to discuss your needs. (All images on this website are my own actual work.) |
Electronics Design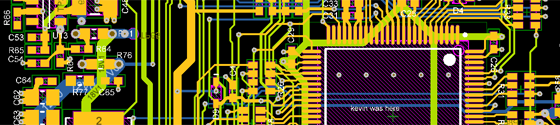
When it comes to embedded hardware, control systems, circuitry design, code, Internet of Things, robotics, automation, and everything in between, I've seen, designed, or been exposed to most of it. [Learn More]
|
Fabrication
I have in-house CAD design, CNC machining, welding and fabrication capability. I often work with aluminum, polypro, acrylic, and other plastics. [Learn More]
|
3D Printing
I have in-house high resolution SLA 3D printing capability. This is a higher resolution printing technology, allowing us to make actual functional parts and highly accurate prototypes that look just like injection molded parts. [Learn More]
|
Fixtures & Prototypes
Need some expertise on that proof of concept? From napkin sketch to final production prototypes, I've got you covered. I'll take the guesswork and dealing with twelve different companies out of the equation. [Learn More]
|
Engineering Consulting
If you need a little guidance with an aspect of your design, I'm happy to help. I've been through this process many times. Everything from system design to production. [Contact]
|
Everything Else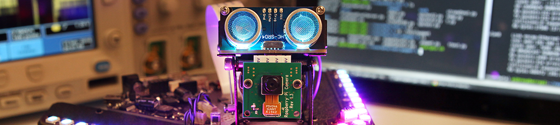
After so many products, I've dealt with the many side issues of design. Everything from crowdfunding, certification, and patents, to sourcing parts from Asia. [Learn More]
|
Projects Portfolio
Spirit Rover Robot - Kickstarter ProjectThe Spirit Rover robot is my most recent 'big' project, and one of the more complex designs I've worked on. Total time from notebook concept sketch to working prototype was about three months.
The Spirit Rover was a huge success on Kickstarter, raising over $170,000. The robot is based around Arduino and the Raspberry Pi single board computer. This is the first thing I've designed that interacts directly with the Raspberry Pi. Unfortunately, the makers of the Raspberry Pi don't provide substantial driver support for accessing the hardware busses of the Pi - like the SPI and I2C bus. I had to write a few custom drivers to overcome this. The Spirit Rover incorporates three different processing systems - a PIC processor controls the low level aspects of the board - moving the servos, monitoring power parameters, and reading sensors in the background. The user code runs on an Arduino processor or a Raspberry Pi, or both. All three devices communicate with each other. This robot was designed for the advanced hobbyist, with lots of flexibility and expansion capabilities. See more on the Kickstarter page. |
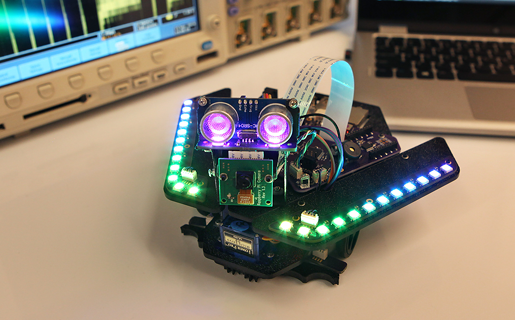
Spirit Rover robot from Kickstarter. Designed 2016.

Altium Designer Layout of 4-layer PCB mainboard for Spirit Rover robot.
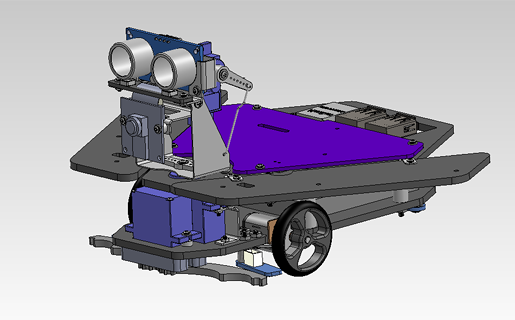
Solidworks model of Spirit Rover robot.
|
Dripio Smart Watering SystemThis has been a fun project to work on for a local client. We designed a proprietary communication protocol that provides power and data over common coax cable. The master unit is connected via WiFi to the cloud for watering programs. Each of the node units are smart valves controlled by the system to automatically perform drip irrigation.
We handled all aspects of the design, from protocol creation, low level software of the board processors, board design, SolidWorks and plastics design for manufacturing and injection molding. This project went from napkin sketch to functional prototype in just over two months. This project is expected to launch on Kickstarter late 2018. |

We designed the plastic enclosure and electronics for the Dripio Smart Valve.
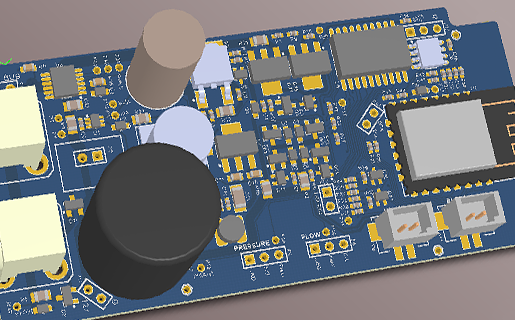
Dripio master controller main board.
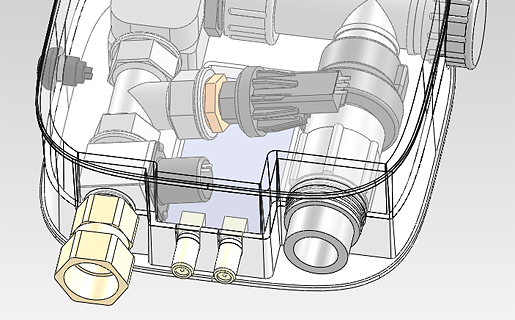
Dripio master controller plumbing configuration.
|
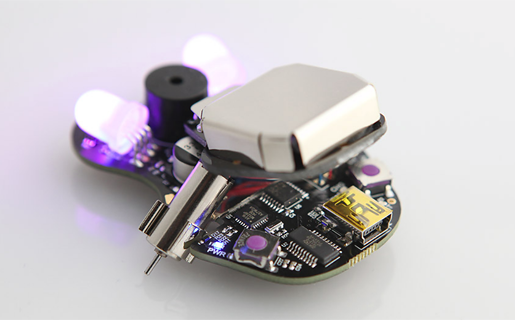
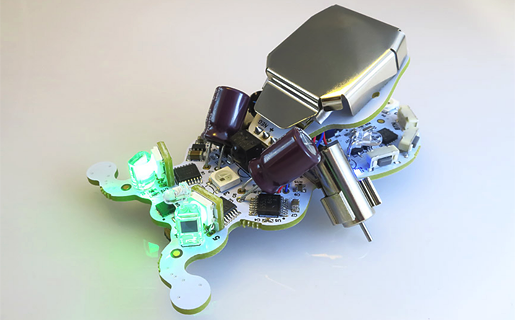
PX Lighting Control SystemWhen invented in 2007, this was the most innovative approach to controlling small hand held camera flashes. We produced thousands of them.
This was my first exposure to designing my own circuit boards, writing code for a microprocessor, the FCC radio certification process, injection molding, contract manufacturers, dealing with employees, and the patent system. It was a trial by fire as they say. This product was very successful and used by some of the world's top creative photographers. |

PX Lighting control radio units. PIC processors, 900MHz DSS radios. 2007-2008.
|
Growtisserie Growing SystemI was contacted by the inventor of this device. Working from his proof of concept unit, I re-created the entire unit in Solidworks and re-designed the motor drive and bearing system. We solved some problems with leaky baskets, creating an improved locking mechanism.
We fabricated a prototype from the new design here in our own shop. The parts were plastic welded together. The unit is undergoing final operational testing. Commercial release is planned for Q3 2018. We are now integrating automated nutrient dosing and remote monitoring functionality so growers can monitor a large number of these machines operating together at the same time. I have really enjoyed this project as it combines the design of a working moving structure with mechanics and plumbing, while integrating electronics and radio systems. All my favorite things in one project. This system combines hydroponics and aeroponics to grow lots of small plants under a single light. It saves space and electrical cost, and uses far less water and nutrients than dirt based growing. |
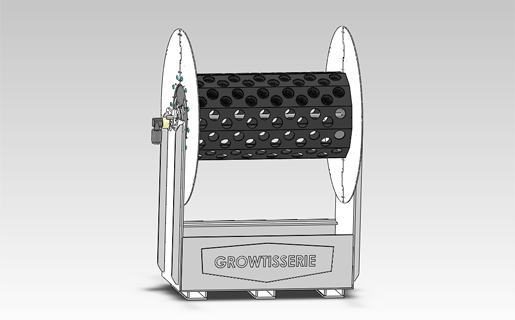
Growing system. Prototype fabricated from polypro in our shop. 2017.
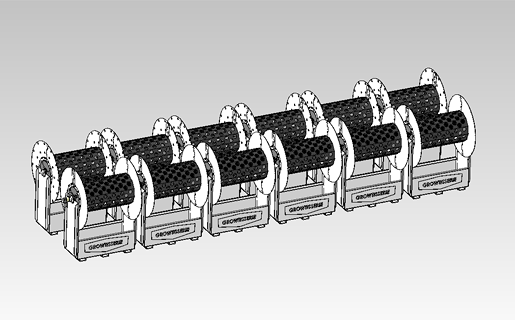
Concept drawing. Multiple growing systems chained together.
|
|

Photographic lighting unit. Designed 2011.
Partial cut-away showing internals. Lots of parts.

Detachable radio control unit for lighting unit. Includes screen and DSS radio.
|
Wink and Ringo Robots - KickstarterThe Ringo robot was my first Kickstarter project, and the project that got me started in robotics. I took an Arduino UNO as the base design and designed the same processor onto the board of the Ringo robot. Instead of pin headers, I directly connected the processor the the associated circuitry.
Wink is similar to Ringo, but scaled down. The main focus of Wink is to teach students and new people how to program with real world C code. There's no dry boring theory up front - we get them straight into doing interesting things and teach them basic coding constructs along the way. Both robots were upgraded in 2016. We moved the programmer hardware onto the robot, so an external programming board is no longer required. To date have have produced about 4000 Wink and Ringo robots between the various versions. The Kickstarter campaigns for these robots raised over $220,000 between them. You can learn more on the associated Kickstarter pages: Wink Kickstarter Campaign Page Ringo Kickstarter Campaign Page |
Wink2 robot. Original 2015, Re-designed 2016.
Ringo2 robot. Original 2014, Re-designed 2016.
|
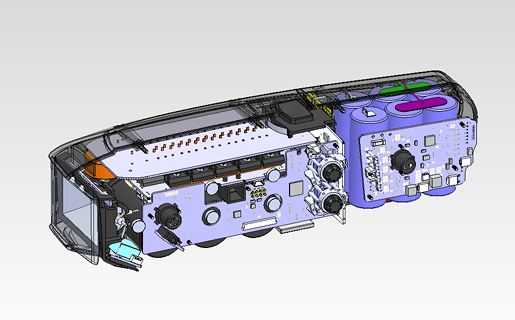
Jr2 Radio SystemThis radio system introduced me to some new technologies. The receiver connects directly to a camera flash, which of course uses a closed and proprietary communication protocol. Between myself and a skilled employee, we were able to reverse-engineer the protocol for two different brands of camera flash.
I designed the enclosure and electronics entirely on my own, while an employee wrote most of the software. This product involved lots of small pieces that needed to fit together perfectly and be easy to assemble in production. This was my first experience with custom designed segment LCD displays. These displays are super low cost but they are a challenge to interface with, and the artwork must be created and specified for correct printing. I created the display artwork in Illustrator then using the Illustrator art as a guide, re-created the entire artwork area in Solidworks. This allows for exact specification of the size of everything. The transmitter device slides onto a camera hot shoe then locks into place. It sounds simple but it involves a few parts. Getting the exact fit and finish of the locking ring was a huge challenge. The receiver device was very challenging to design and route onto the board. Our version of this device allows a single receiver to control two different brands of flashes, with different pin-outs, electric signal levels, and protocol. The schematic work for the hot shoe is incredible to study. The finished board is four layers, 1mm thick, with traces and spaces down to .005". The finished device is still easy to manufacture and assemble. |

Jr2 Radio System, Receiver and Transmitter. Designed 2013.
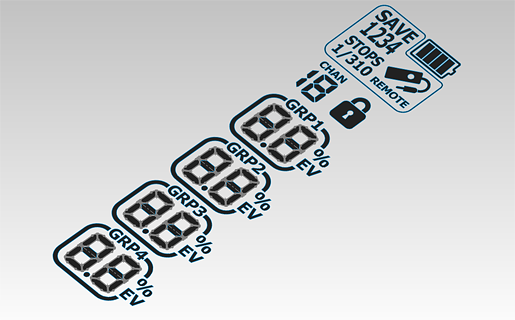
Segment LCD artwork. Concept in Illustrator, re-created in Solidworks for
sending to the display manufacturer in China. 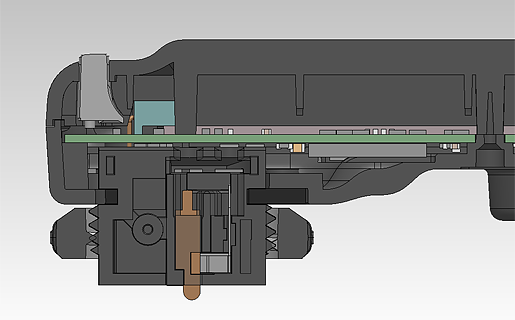
Transmitter has a complex locking mechanism. Three injection molded parts, four custom stamped metal parts and springs. The assembly is a tight, precise fit.
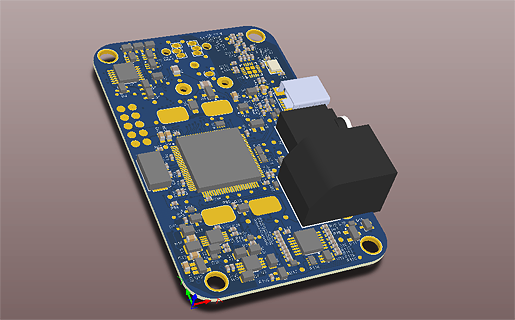
Receiver board, extremely tightly routed. We crammed in two rails of power regulation, interface circuitry to connect to two different brands of camera flash, a 900MHz DSS radio, and segment LCD control. The entire device is about the size of a deck of playing cards.
|
CNC Machine BuildI began seriously researching CNC machines in early 2017. I ended up building my own from various kit parts. This machine arrived in a bunch of crates and boxes. Over the next week the kids and I put it together.
The machine is industrial quality with high end stepper motors and a high torque spindle. It can handle plastic parts easily as well as wood and soft metals like aluminum. The 4x8' working area allows us to use full sheets of material and fabricate large parts. I did some custom wiring work during the assembly. I modified the power and control system to add capability to control a 4th axis, which I plan to add to the machine in the future. |
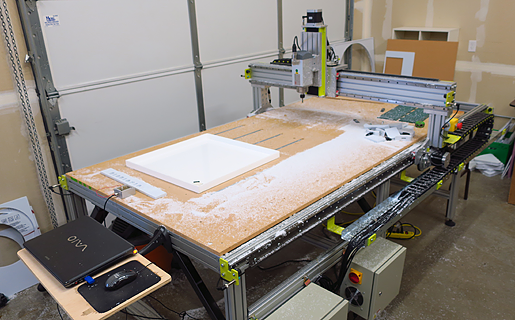
Our 4x8' CNC machine, built from kit. 2017.
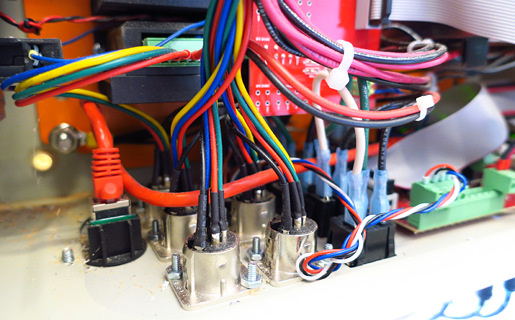
Custom wiring harness to control eventual 4th axis. 2017.
|
PatentsWhile not as interesting or fun to play with, I hold seven patents on camera lighting and communications technology. I can't provide any legal advice but I'm happy to share my experiences and perspective when it comes to intellectual property.
|
Collection of patents. 2007 ~ 2013.
|